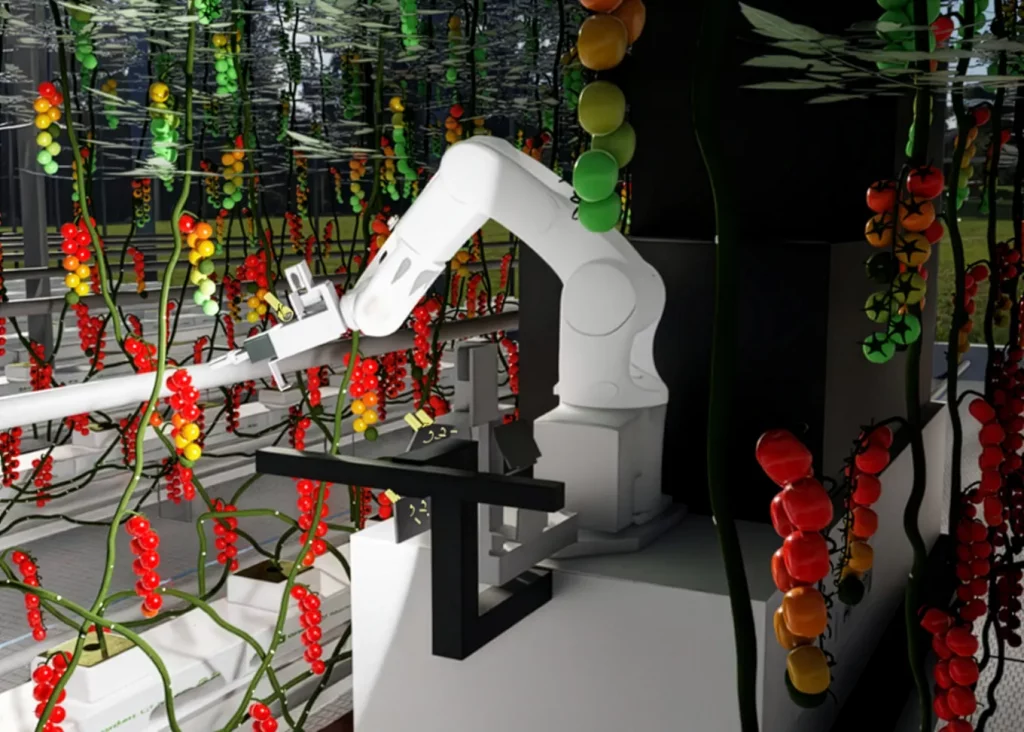
Hoe laat je een robot tomaten oogsten in een omgeving die voortdurend verandert? Wageningen University & Research (WUR) onderzoekt hoe simulatie kan helpen om oogstrobots sneller en gerichter te ontwikkelen voor de tuinbouw. Daarbij bouwen onderzoekers aan een gesimuleerde kasomgeving waarin robots en tomatenplanten realistisch met elkaar interacteren.
“Robotsimulatie is vrij gebruikelijk in gecontroleerde omgevingen zoals autofabrieken, maar in de tuinbouw is dit echt nieuw,” zegt Arjan Vroegop, onderzoeker bij WUR en projectleider binnen het Vision+Robotics-team. “Hier heb je te maken met levende planten, met veel natuurlijke variatie. Dat maakt simulatie veel ingewikkelder.” De kern van het onderzoek ligt in het combineren van verschillende expertises binnen WUR. Binnen het Digital Twin-project werken onderzoekers op het gebied van robotica, simulatie, gewasfysiologie en 3D-modellering samen. Het doel is om niet alleen de robotbewegingen te simuleren, maar ook het gewas zelf, inclusief vorm, variatie en fysieke eigenschappen.
“In eerdere onderzoeksprojecten deden we al aan gewasmodellering en groeisimulatie,” zegt Vroegop. “Maar daarbij was een realistische visuele weergave niet noodzakelijk. In dit project wel, omdat de robot moet kunnen waarnemen waar vruchten hangen en hoe hij daarmee fysiek in contact komt.” Die planten worden gemodelleerd door onderzoekers uit de gewasfysiologie. WUR-onderzoeker Maarten van der Meer werkt aan de 3D-modellering van tomatenplanten. “We meten echte planten en reconstrueren die virtueel op basis van vaste meetprotocollen,” legt hij uit. “Door variatie toe te staan binnen gemeten grenzen, zoals in hoogte, bladstand en vruchtpositie, kunnen we veel verschillende, realistische planten genereren.”
Lees het hele bericht op de site van de WUR.